自动驾驶:特斯拉的FSD可以做到城市路段任意三英里两点间80%情况下无需干预进行安全且不尴尬的行驶。(如何证伪?在家附近随机挑选符合要求的五段路进行测试,其中四个路段必须无干预点到点。)(细节:归功于类似InstructGPT的RLHF的使用和Language of Lanes的配合,基本上就是用自然语言处理的当前优势加上更多的无监管学习来解决自动驾驶。)
Economy: The economy is continuing to decline, with the stock market and housing market experiencing a drop of more than 20% at their lowest points. (To verify: The median price of a home in the US in November 2022 was $393,935, and the .DJI was at $33,630 on January 3rd. Therefore, the lowest point for housing prices would be below $315,148, and the lowest point for the .DJI would be below $26,904.)
Artificial intelligence: Humans are starting to obsessively seek out artificial intelligence for guidance. Just as twenty years ago people transitioned from searching for information in libraries to searching for knowledge on Google, this time we are transitioning to searching for wisdom through artificial intelligence. (To verify: In at least three important fields, breakthrough developments have been achieved as a result of artificial intelligence teaching humans new ways of thinking that they had not previously considered.) (Aside: Don’t naïvely think that any creative work will be immune to replacement by artificial intelligence. In the not-so-distant future, humans will be laughed at by AI whenever humans start to be creative. 2022 was the beginning of that era. In the digital world, humans will undergo an AGI baptism. But don’t worry, in the physical world, humans have a long way to go before being outdone by AI.)
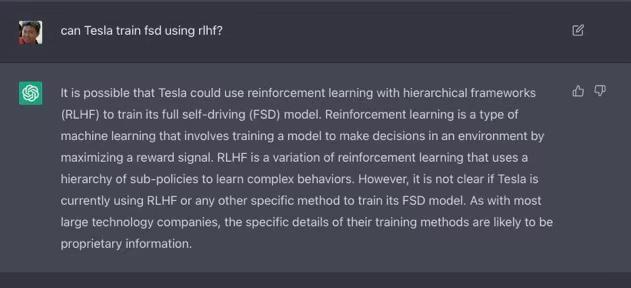
Autonomous driving: Tesla’s FSD can safely and smoothly travel between any two points within three miles on city roads without human intervention in 80% of cases. (To verify: Test five randomly selected routes in my city that meet the requirements, with four of the routes requiring point-to-point travel without intervention.) (Details: This is essentially achieved through the use of natural language processing and more unsupervised learning, thanks to the use of something RLHF-related similar to InstructGPT and the combination of Language of Lanes for autonomous driving.)
Space: The Starship has completed its orbit test and has successfully been recovered, officially taking over as the primary launch vehicle for Falcon 9. (To verify: The Starship has completely replaced the Falcon 9 for launching Starlink and has received commercial orders for use on future launches on and after 2024.)
ChatGPT的出色表现,让我对自动驾驶的到来增加了不少信心。特斯拉本来就已经在用视觉组件加地图组件生成三维dense world vector作为输入,经过transformer based语言模型来infer车道在三维空间的位置。对于自动驾驶系统来说,它“预测”的不是车道的位置,而是根据一种车道语言,预测接下来最合理最有可能出现的车道词语。我其实一直以为fsd的影子模式就是用RLHF来训练一个奖励模型然后用作无监督机器学习,难道不是的吗?!无论如何,马克一下,自动驾驶行业会沿着ChatGPT的路,在这一两年内快速上一个台阶,那种“笨拙”的自动驾驶将会突然变成遥远的过去。(谷歌上竟然搜不到有文章同时提及ChatGPT和fsd,谷歌地位真的有点危险)
Berrio, J. S., Shan, M., Worrall, S., & Nebot, E. (2021). Camera-LIDAR Integration: Probabilistic Sensor Fusion for Semantic Mapping. IEEE Transactions on Intelligent Transportation Systems, 1–16. https://doi.org/10.1109/tits.2021.3071647
John, V., & Mita, S. (2021). Deep Feature-Level Sensor Fusion Using Skip Connections for Real-Time Object Detection in Autonomous Driving. Electronics, 10(4), 424. https://doi.org/10.3390/electronics10040424
Mendez, J., Molina, M., Rodriguez, N., Cuellar, M. P., & Morales, D. P. (2021). Camera-LiDAR Multi-Level Sensor Fusion for Target Detection at the Network Edge. Sensors, 21(12), 3992. https://doi.org/10.3390/s21123992